Week 7: Markov Models
DSAN 5100: Probabilistic Modeling and Statistical Computing
Section 01
Tuesday, October 14, 2025
The Markov Property
\[ P(\text{future} \mid \text{present}, {\color{orange}\text{past}}) = P(\text{future} \mid \text{present}) \]

Modeling Music: Where is the Downbeat?



State Space Choice \(\rightarrow\) Information Loss
- Recall the Move Left/Move Right Game (especially from Lab 4 Prep)

| History vector | Position | Steps | #L | #R |
|---|---|---|---|---|
| \(()\) | \(x = 0\) | 0 | 0 | 0 |
| \((L,R)\) | \(x = 0\) | 2 | 1 | 1 |
| \((R,L)\) | \(x = 0\) | 2 | 1 | 1 |
| \((R,L,R,\) \(~L,R,L)\) |
\(x = 0\) | 6 | 3 | 3 |
| \((L)\) | \(x = -1\) | 1 | 1 | 0 |
| \((L,L,R)\) | \(x = -1\) | 3 | 2 | 1 |
Finite-State Automata
(Deterministic!) Only “accepts” strings with even number of 1s:

| Input String | Result | Input String | Result |
|---|---|---|---|
| \(\varepsilon\) | ✅ | 01 |
|
0 |
✅ | 10 |
|
1 |
1000000 |
||
00 |
✅ | 10000001 |
✅ |
- …But we’re trying to model probabilistic evolution!
Enter Markov Chains


\[ \begin{array}{c c} & \begin{array}{c c c} 1 & 2 & 3 \\ \end{array} \\ \begin{array}{c c c}1 \\ 2 \\ 3 \end{array} & \left[ \begin{array}{c c c} 0 & 1/2 & 1/2 \\ 1/3 & 0 & 2/3 \\ 1/3 & 2/3 & 0 \end{array} \right] \end{array} \]
\[ \begin{array}{c c} & \begin{array}{c c c} 1 & 2 & 3 \\ \end{array} \\ \begin{array}{c c c}1 \\ 2 \\ 3 \end{array} & \left[ \begin{array}{c c c} 1/2 & 1/3 & 1/6 \\ 1/10 & 1/2 & 2/5 \\ 1/8 & 3/8 & 1/2 \end{array} \right] \end{array} \]

PageRank (Matrix Magic)
- What is the relevance of this abstract topic? …🤑
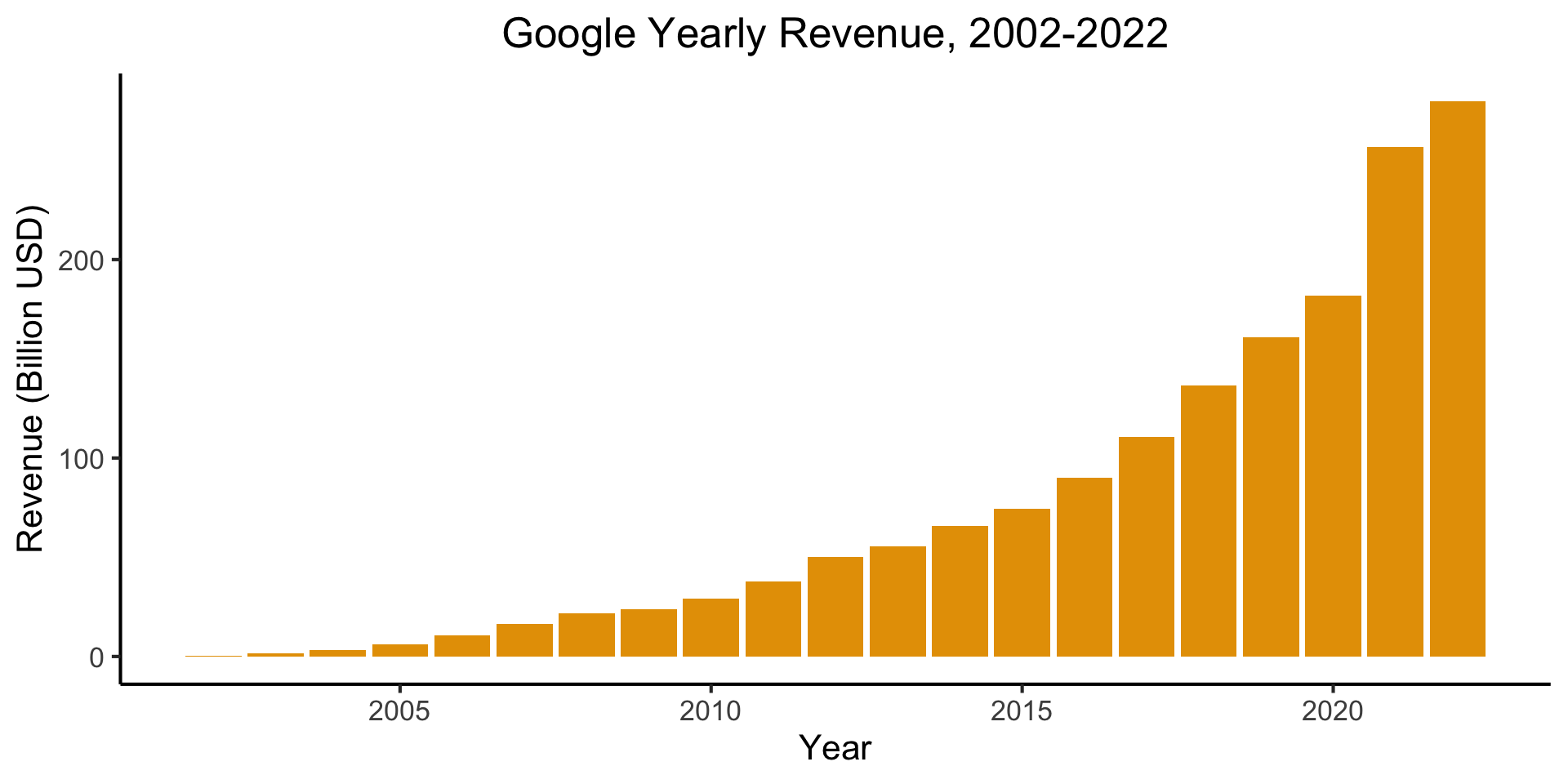
- PageRank = The “spark” that ignited the Google flame
PageRank Visualized
- Nodes = Webpages, Edges = Links

- Goal: Rank the relative “importance” of a site \(S_i\), taking into account the importance of other sites that link to \(S_i\)
- “Important” sites: linked to often, and linked to often by other important sites